Persistent trees are more interesting than persistent lists, which were the topic of my previous blog. In this installment I will concentrate on binary search trees. Such trees store values that can be compared to each other (they support total ordering). Such trees may be used to implement sets, multisets, or associated arrays. Here I will focus on the simplest of those, the set — the others are an easy extensions of the same scheme.
A set must support insertion, and membership test (I’ll leave deletion as an exercise). These operations should be doable, on average, in logarithmic time, O(log(N)). Only balanced trees, however, can guarantee logarithmic time even in the worst case. A simple tree may sometimes degenerate to a singly-linked list, with performance dropping to O(N). I will start with a simple persistent tree and then proceed with a balanced red-black tree.
Persistent Binary Search Tree
As with lists, we will start with an abstract definition:
A tree is either empty or contains a left tree, a value, and a right tree.
This definition translates into a data structure with two constructors:
template<class T>
class Tree {
public:
Tree(); // empty tree
Tree(Tree const & lft, T val, Tree const & rgt)
};
Just as we did with persistent lists, we’ll encode the empty/non-empty tree using null/non-null (shared) pointer to a node. A Node represents a non-empty tree:
struct Node
{
Node(std::shared_ptr<const Node> const & lft
, T val
, std::shared_ptr<const Node> const & rgt)
: _lft(lft), _val(val), _rgt(rgt)
{}
std::shared_ptr<const Node> _lft;
T _val;
std::shared_ptr<const Node> _rgt;
};
Here’s the complete construction/deconstruction part of the tree. Notice how similar it is to the list from my previous post. All these methods are const O(1) time, as expected. As before, the trick is to construct a new object (Tree) from big immutable chunks (lft and rgt), which can be safely put inside shared pointers without the need for deep copying.
template<class T>
class Tree
{
struct Node;
explicit Tree(std::shared_ptr<const Node> const & node)
: _root(node) {}
public:
Tree() {}
Tree(Tree const & lft, T val, Tree const & rgt)
: _root(std::make_shared<const Node>(lft._root, val, rgt._root))
{
assert(lft.isEmpty() || lft.root() < val);
assert(rgt.isEmpty() || val < rgt.root());
}
bool isEmpty() const { return !_root; }
T root() const {
assert(!isEmpty());
return _root->_val;
}
Tree left() const {
assert(!isEmpty());
return Tree(_root->_lft);
}
Tree right() const {
assert(!isEmpty());
return Tree(_root->_rgt);
}
private:
std::shared_ptr<const Node> _root;
};
Insert
The persistent nature of the tree manifests itself in the implementation of insert. Instead of modifying the existing tree, insert creates a new tree with the new element inserted in the right place. The implementation is recursive, so imagine that you are at a subtree of a larger tree. This subtree might be empty. Inserting an element into an empty tree means creating a single-node tree with the value being inserted, x, and two empty children.
On the other hand, if you’re not in an empty tree, you can retrieve the root value y and compare it with x. If x is less then y, it has to be inserted into the left child. If it’s greater, it must go into the right child. In both cases we make recursive calls to insert. If x is neither less nor greater than y, we assume it’s equal (that’s why we need total order) and ignore it. Remember, we are implementing a set, which does not store duplicates.
Tree insert(T x) const {
if (isEmpty())
return Tree(Tree(), x, Tree());
T y = root();
if (x < y)
return Tree(left().insert(x), y, right());
else if (y < x)
return Tree(left(), y, right().insert(x));
else
return *this; // no duplicates
}
Now consider how many new nodes are created during an insertion. A new node is only created in the constructor of a tree (in the code: std::make_shared<const Node>(lft._root, val, rgt._root)). The left and right children are not copied, they are stored by reference. At every level of insert, a tree constructor is called at most once. So in the worst case, when we recurse all the way to the leaves of the tree, we only create h nodes, where h is the height of the tree. If the tree is not too much out of balance its height scales like a logarithm of the number of nodes. To give you some perspective, if you store a billion values in a tree, an insertion will cost you 30 copies on average. If you need a logarithmic bound on the worst case, you’d have to use balanced trees (see later).
If you study the algorithm more closely, you’ll notice that only the nodes that are on the path from the root to the point of insertion are modified.
Testing for membership in a persistent tree is no different than in a non-persistent one. Here’s the recursive algorithm:
bool member(T x) const {
if (isEmpty())
return false;
T y = root();
if (x < y)
return left().member(x);
else if (y < x)
return right().member(x);
else
return true;
}
When using C++11, you might take advantage of the initializer list constructor to initialize a tree in one big swoop like this:
Tree t{ 50, 40, 30, 10, 20, 30, 100, 0, 45, 55, 25, 15 };
.
Here’s the implementation of such constructor, which works in O(N*log(N)) average time (notice that it effectively sorts the elements, and O(N*log(N)) is the expected asymptotic behavior for sort):
Tree(std::initializer_list<T> init) {
Tree t;
for (T v: init) {
t = t.insert(v);
}
_root = t._root;
}
Persistent Red-Black Tree
If you want to keep your tree reasonably balanced — that is guarantee that its height is on the order of log(N) — you must do some rebalancing after inserts (or deletes). Care has to be taken to make sure that rebalancing doesn’t change the logarithmic behavior of those operations. The balance is often expressed using some invariants. You can’t just require that every path from root to leaf be of equal length, because that would constrain the number of elements to be always a power of two. So you must give it some slack.
In the case of a red-black tree, the invariants are formulated in terms of colors. Every node in the tree is marked as either red or black. These are the two invariants that have to be preserved by every operation:
- Red invariant: No red node can have a red child
- Black invariant: Every path from root to an empty leaf node must contain the same number of black nodes — the black height of the tree.
This way, if the shortest path in a tree is all black, the longest path could only be twice as long, containing one red node between each pair of black nodes. The height of such a tree could only vary between (all black) log(N) and (maximum red) 2*log(N).
With these constraints in mind, the re-balancing can be done in log(N) time by localizing the modifications to the nearest vicinity of the path from the root to the point of insertion or deletion.
Let’s start with basic definitions. The node of the tree will now store its color:
enum Color { R, B };
Otherwise, it’s the same as before:
struct Node
{
Node(Color c,
std::shared_ptr const & lft,
T val,
std::shared_ptr const & rgt)
: _c(c), _lft(lft), _val(val), _rgt(rgt)
{}
Color _c;
std::shared_ptr _lft;
T _val;
std::shared_ptr _rgt;
};
An empty tree will be considered black by convention.
The membership test ignores colors so we don’t have to re-implement it. In fact the search performance of a persistent RB Tree is exactly the same as that of an imperative RB Tree. You pay no penalty for persistence in search.
With insertion, you pay the penalty of having to copy the path from root to the insertion point, which doesn’t change its O(log(N)) asymptotic behavior. As I explained before, what you get in exchange is immutability of every copy of your data structure.
The Balancing
Let’s have a look at the previous version of insert and figure out how to modify it so the result preserves the RB Tree invariants.
Tree insert(T x) const {
if (isEmpty())
return Tree(Tree(), x, Tree());
T y = root();
if (x < y)
return Tree(left().insert(x), y, right());
else if (y < x)
return Tree(left(), y, right().insert(x));
else
return *this; // no duplicates
}
Let’s first consider the most difficult scenario: the insertion into a maximum capacity tree for a given black height. Such a tree has alternating levels of all black and all red nodes. The only way to increase its capacity is to increase its black height. The cheapest way to add one more black level to all paths (thus preserving the black invariant) is to do it at the root (for instance, lengthening all the path at the leaves would require O(N) red-to-black re-paintings).
So here’s the plan: We’ll insert a new node at the leaf level and make it red. This won’t break the black invariant, but may break the red invariant (if the parent node was red). We’ll then retrace our steps back to the root, percolating any red violation up. Then, at the top level, we’ll paint the resulting root black, thus killing two birds with one stone: If we ended up with a red violation at the top, this will fix it and, at the same time, increase the black height of the whole tree.
It’s important that during percolation we never break the black invariant.
So here’s how we execute this plan: insert will call the recursive insertion/re-balancing method ins, which might return a red-topped tree. We’ll paint that root black (if it’s already black, it won’t change anything) and return it to the caller:
RBTree insert(T x) const {
RBTree t = ins(x);
return RBTree(B, t.left(), t.root(), t.right());
}
In the implementation of ins, the first case deals with an empty tree. This situation happens when it’s the first insertion into an empty tree or when, during the recursive process, we’ve reached the insertion point at the bottom of the tree. We create a red node and return it to the caller:
if (isEmpty())
return RBTree(R, RBTree(), x, RBTree());
Notice that, if this new node was inserted below another red node, we are creating a red violation. If that node was the root of the whole tree, insert will repaint it immediately. If it weren’t, and we pop one level up from recursion, we’ll see that violation. We can’t fix it at that point — for that we’ll have to pop one more level, up to the black parent, where we have more nodes to work with.
Here are the details of ins: We’ll follow the same logic as in the non-balanced tree, thus preserving the ordering of values; but instead of reconstructing the result tree on the spot we’ll call a function balance, which will do that for us in a semi-balanced way (that is, with a possibility of a red violation, but only at the very top).
RBTree ins(T x) const
{
if (isEmpty())
return RBTree(R, RBTree(), x, RBTree());
T y = root();
Color c = rootColor();
if (x < y)
return balance(c, left().ins(x), y, right());
else if (y < x)
return balance(c, left(), y, right().ins(x));
else
return *this; // no duplicates
}
Just like the constructor of the red-black tree, balance takes the following arguments: color, left subtree, value, and right subtree. Depending on the result of the comparison, the new element is inserted either into the left or the right subtree.
As I explained, balance, and consequently ins, cannot fix the red violation when they are sitting on it. All they can do is to make sure that the violation is at the very top of the tree they return. So when we call balance with the result of ins, as in:
balance(c, left().ins(x), y, right())
or:
balance(c, left(), y, right().ins(x))
the left or the right subtree, respectively, may be semi-balanced. This is fine because balance can then rotate this violation away.
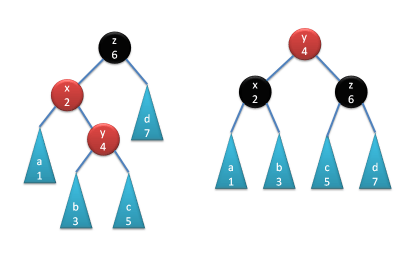
So the interesting cases for balance are the ones that rebuild a black node with either the left or the right subtree having a red violation at the top.
There are four possible cases depending on the position of the violation. In each case we can rearrange the nodes in such a way that the violation disappears and the ordering is preserved. In the pictures below I have numbered the nodes and subtrees according to the order of the values stored in them. Remember that all values in the left subtree are less than the value stored in the node, which in turn is less than all the values in the right subtree.

Rotating lft.doubledLeft()

Rotating lft.doubledRight()()

Rotating rgt.doubledLeft()

Rotating rgt.doubledRight()()
Each rotation creates a tree that preserves both invariants. Notice, however, that the result of the rotation is always red-tipped, even though we were rebuilding a node that was originally black. So if the parent of that node was red, our caller will produce a red violation (it will call balance with red color as its argument, which will fall through to the default case). This violation will be then dealt with at the parent’s parent level.
static RBTree balance(Color c
, RBTree const & lft
, T x
, RBTree const & rgt)
{
if (c == B && lft.doubledLeft())
return RBTree(R
, lft.left().paint(B)
, lft.root()
, RBTree(B, lft.right(), x, rgt));
else if (c == B && lft.doubledRight())
return RBTree(R
, RBTree(B, lft.left(), lft.root(), lft.right().left())
, lft.right().root()
, RBTree(B, lft.right().right(), x, rgt));
else if (c == B && rgt.doubledLeft())
return RBTree(R
, RBTree(B, lft, x, rgt.left().left())
, rgt.left().root()
, RBTree(B, rgt.left().right(), rgt.root(), rgt.right()));
else if (c == B && rgt.doubledRight())
return RBTree(R
, RBTree(B, lft, x, rgt.left())
, rgt.root()
, rgt.right().paint(B));
else
return RBTree(c, lft, x, rgt);
}
For completeness, here are the auxiliary methods used in the implementation of balance:
bool doubledLeft() const {
return !isEmpty()
&& rootColor() == R
&& !left().isEmpty()
&& left().rootColor() == R;
}
bool doubledRight() const {
return !isEmpty()
&& rootColor() == R
&& !right().isEmpty()
&& right().rootColor() == R;
}
RBTree paint(Color c) const {
assert(!isEmpty());
return RBTree(c, left(), root(), right());
}
Conclusion
Our implementation of the persistent red-black tree follows the Chris Okasaki’s book. As Chris asserts, this is one of the fastest implementations there is, and he offers hints to make it even faster. Of course there are many imperative implementations of red-black trees, including STL’s std::set and std::map. Persistent RB-trees match their performance perfectly when it comes to searching. Insertion and deletion, which are O(log(N)) for either implementation, are slower by a constant factor because of the need to copy the path from root to leaf. On the other hand, the persistent implementation is thread-safe and synchronization-free (except for reference counting in shared_ptr — see discussion in my previous blog).
Complete code is available at GitHub.
Acknowledgment
I’d like to thank Eric Niebler for reading the draft and telling me which of my explanations were more abstruse than usual.
Haskell Code
For comparison, here’s the original Haskell code. You can see that the C++ implementation preserves its structure pretty well. With proper optimization tricks (unboxing and eager evaluation) the Haskell code should perform as well as its C++ translation.
Regular (unbalanced) binary search tree:
data Tree a = Empty | Node (Tree a) a (Tree a)
member x Empty = False
member x (Node lft y rgt) =
if x < y then member x lft
else if y < x then member x rgt
else True
insert x Empty = Node Empty x Empty
insert x t@(Node lft y rgt) =
if x < y then Node (insert x lft) y rgt
else if y < x then Node lft y (insert x rgt)
else t
Balanced Red-Black tree:
data Color = R | B
data Tree a = Empty | Node Color (Tree a) a (Tree a)
member x Empty = False
member x (Node _ lft y rgt) =
if x < y then member x lft
else if y < x then member x rgt
else True
insert x tree = Node B left val right
where
ins Empty = Node R Empty x Empty
ins t@(Node c lft y rgt) =
if (x < y) then balance c (ins lft) y rgt
else if (y < x) then balance c lft y (ins rgt)
else t
Node _ left val right = ins tree -- pattern match result of ins
balance B (Node R (Node R a x b) y c) z d =
Node R (Node B a x b) y (Node B c z d)
balance B (Node R a x (Node R b y c)) z d =
Node R (Node B a x b) y (Node B c z d)
balance B a x (Node R (Node R b y c) z d) =
Node R (Node B a x b) y (Node B c z d)
balance B a x (Node R b y (Node R c z d)) =
Node R (Node B a x b) y (Node B c z d)
balance color a x b = Node color a x b
“Data structures in functional languages are immutable.”
What?! How can you write programs if you can’t mutate data? To an imperative programmer this sounds like anathema. “Are you telling me that I can’t change a value stored in a vector, delete a node in a tree, or push an element on a stack?” Well, yes and no. It’s all a matter of interpretation. When you give me a list and I give you back the same list with one more element, have I modified it or have I constructed a brand new list with the same elements plus one more?
Why would you care? Actually, you might care if you are still holding on to your original list. Has that list changed? In a functional language, the original data structure will remain unmodified! The version from before the modification persists — hence such data structures are called persistent (it has nothing to do with being storable on disk).
In this post I will discuss the following aspects of persistent data structures:
- They are immutable, therefore
- They are easier to reason about and maintain
- They are thread-safe
- They can be implemented efficiently
- They require some type of resource management to “garbage collect” them.
I will illustrate these aspects on a simple example of a persistent linked list implemented in C++.
Motivation
There is a wealth of persistent data structures in functional languages, a lot of them based on the seminal book by Chris Okasaki, Purely Functional Data Structures (based on his thesis, which is available online). Unfortunately, persistent data structures haven’t found their way into imperative programming yet. In this series of blog posts I’ll try to provide the motivation for using functional data structures in imperative languages and start translating some of them into C++. I believe that persistent data structures should be part of every C++ programmer’s toolbox, especially one interested in concurrency and parallelism.
Persistence and Immutability
What’s the advantage of persistent data structures? For one, they behave as if they were immutable, yet you can modify them. The trick is that the modifications never spread to the aliases of the data structure — nobody else can observe them other that the mutator itself. This way you avoid any implicit long-distance couplings. This is important for program maintenance — you know that your bug fixes and feature tweaks will remain localized, and you don’t have to worry about breaking remote parts of the program that happen to have access to the same data structure.
There is another crucial advantage of immutable data structures — they are thread safe! You can’t have a data race on a structure that is read-only. Since copies of a persistent data structure are immutable, you don’t need to synchronize access to them. (This is, by the way, why concurrent programming is much easier in functional languages.)
Persistence and Multithreading
So if you want just one reason to use persistent data structures — it’s multithreading. A lot of conventional wisdom about performance is void in the face of multithreading. Concurrent and parallel programming introduces new performance criteria. It forces you to balance the cost of accessing data structures against the cost of synchronization.
Synchronization is hard to figure out correctly in the first place and is fraught with such dangers as data races, deadlocks, livelocks, inversions of control, etc. But even if your synchronization is correct, it may easily kill your performance. Locks in the wrong places can be expensive. You might be tempted to use a traditional mutable data structure like a vector or a tree under a single lock, but that creates a bottleneck for other threads. Or you might be tempted to handcraft your own fine granularity locking schemes; which is tantamount to designing your own data structures, whose correctness and performance characteristics are very hard to estimate. Even the lock-free data structures of proven correctness can incur substantial synchronization penalty by spinning on atomic variables (more about it later).
The fastest synchronization is no synchronization at all. That’s why the holy grail of parallelism is either not to share, or share only immutable data structures. Persistent data structures offer a special kind of mutability without the need for synchronization. You are free to share these data structures without synchronization because they never change under you. Mutation is accomplished by constructing a new object.
Persistence and Performance
So what’s the catch? You guessed it — performance! A naive implementation of a persistent data structure would require a lot of copying — the smallest modification would produce a new copy of the whole data structure. Fortunately, this is not necessary, and most implementations try to minimize copying by essentially storing only the “deltas.” Half of this blog will be about performance analysis and showing that you can have your cake and eat it too.
Every data structure has unique performance characteristics. If you judge a C++ vector by the performance of indexed access, its performance is excellent: it’s O(1) — constant time. But if you judge it by the performance of insert, which is O(N) — linear time — it’s pretty bad. Similarly, persistent data structures have their good sides and bad sides. Appending to the end of a persistent singly-linked list, for instance, is O(N), but push and pop from the front are a comfortable O(1).
Most importantly, major work has been done designing efficient persistent data structures. In many cases they closely match the performance of mutable data structures, or are within a logarithm from them.
Persistent List: First Cut
Before I get to more advanced data structures in the future installments of this blog, I’d like to start with the simplest of all: singly-linked list. Because it’s so simple, it will be easy to demonstrate the craft behind efficient implementation of persistency.
We all know how to implement a singly linked list in C++. Let’s take a slightly different approach here and define it abstractly first. Here’s the definition:
A list of T is either empty or consists of an element of type T followed by a list of T.
This definition translates directly into a generic data structure with two constructors, one for the empty list and another taking the value/list (head/tail) pair:
template<class T>
class List {
public:
List();
List(T val, List tail);
...
};
Here’s the trick: Since we are going to make all Lists immutable, we can guarantee that the second argument to the second constructor (marked in red) is forever frozen. Therefore we don’t have to deep-copy it, we can just store a reference to it inside the list. This way we can implement this constructor to be O(1), both in time and space. It also means that those List modifications that involve only the head of the list will have constant cost — because they can all share the same tail. This is very important, because the naive copying implementation would require O(N) time. You’ll see the same pattern in other persistent data structures: they are constructed from big immutable chunks that can be safely aliased rather than copied. Of course this brings the problem of being able to collect the no-longer-referenced tails — I’ll talk about it later.
Another important consequence of immutability is that there are two kinds of Lists: empty and non-empty. A List that was created empty will always remain empty. So the most important question about a list will be whether it’s empty or not. Something in the implementation of the list must store this information. We could, for instance, have a Boolean data member, _isEmpty, but that’s not what we do in C++. For better or worse we use this “clever” trick called the null pointer. So a List is really a pointer that can either be null or point to the first element of the list. That’s why there is no overhead in passing a list by value — we’re just copying a single pointer.
Is it a shallow or a deep copy? Technically it’s shallow, but because the List is (deeply) immutable, there is no observable difference.
Here’s the code that reflects the discussion so far:
template<class T>
class List
{
struct Item;
public:
List() : _head(nullptr) {}
List(T v, List tail) : _head(new Item(v, tail._head)) {}
bool isEmpty() const { return !_head; }
private:
// may be null
Item const * _head;
};
The Item contains the value, _val and a pointer _next to the (constant) Item (which may be shared between many lists):
struct Item
{
Item(T v, Item const * tail) : _val(v), _next(tail) {}
T _val;
Item const * _next;
};
The fact that items are (deeply) immutable can’t be expressed in the C++ type system, so we use (shallow) constness and recursive reasoning to enforce it.
In a functional language, once you’ve defined your constructors, you can automatically use them for pattern matching in order to “deconstruct” objects. For instance, an empty list would match the empty list pattern/constructor and a non-empty list would match the (head, tail) pattern/constructor (often called “cons”, after Lisp). Instead, in C++ we have to define accessors like front, which returns the head of the list, and pop_front, which returns the tail:
T front() const
{
assert(!isEmpty());
return _head->_val;
}
List pop_front() const
{
assert(!isEmpty());
return List(_head->_next);
}
In the implementation of pop_front I used an additional private constructor:
explicit List (Item const * items) : _head(items) {}
Notice the assertions: You are not supposed to call front or pop_front on an empty list. Make sure you always check isEmpty before you call them. Admittedly, this kind of interface exposes the programmer to potential bugs (forgetting to check for an empty list) — something that the pattern-matching approach of functional languages mitigates to a large extent. You could make these two methods safer in C++ by using boost optional, but not without some awkwardness and performance overhead.
We have defined five primitives: two constructors plus isEmpty, front, and pop_front that completely describe a persistent list and are all of order O(1). Everything else can be implemented using those five. For instance, we may add a helper method push_front:
List push_front(T v) const {
return List(v, *this);
}
Notice that push_front does not modify the list — it returns a new list with the new element at its head. Because of the implicit sharing of the tail, push_front is executed in O(1) time and takes O(1) space.
The list is essentially a LIFO stack and its asymptotic behavior is the same as that of the std::vector implementation of stack (without the random access, and with front and back inverted). There is an additional constant cost of allocating Items (and deallocating them, as we’ll see soon) both in terms of time and space. In return we are gaining multithreaded performance by avoiding the the need to lock our immutable data structures.
I’m not going to argue whether this tradeoff is always positive in the case of simple lists. Remember, I used lists to demonstrate the principles behind persistent data structures in the simplest setting. In the next installment though, I’m going to make a stronger case for tree-based data structures.
Reference Counting
If we could use garbage collection in C++ (and there are plans to add it to the Standard) we’d be done with the List, at least in the case of no hard resources (the ones that require finalization). As it is, we better come up with the scheme for releasing both memory and hard resources owned by lists. Since persistent data structures use sharing in their implementation, the simplest thing to do is to replace naked pointers with shared pointers.
Let’s start with the pointer to the head of the list:
std::shared_ptr<const Item> _head;
We no longer need to initialize _head to nullptr in the empty list constructor because shared_ptr does it for us. We need, however, to construct a new shared_ptr when creating a list form a head and a tail:
List() {}
List(T v, List const & tail)
: _head(std::make_shared<Item>(v, tail._head)) {}
Item itself needs a shared_ptr as _next:
struct Item
{
Item(T v, std::shared_ptr<const Item> const & tail)
: _val(v), _next(tail) {}
T _val;
std::shared_ptr<const Item> _next;
};
Surprisingly, these are the only changes we have to make. Everything else just works. Every time a shared_ptr is copied, as in the constructors of List and Item, a reference count is automatically increased. Every time a List goes out of scope, the destructor of _head decrements the reference count of the first Item of the list. If that item is not shared, it is deleted, which decreases the reference count of the next Item, and so on.
Let’s talk about performance again, because now we have to deal with memory management. Reference counting doesn’t come for free. First, a standard implementation of shared_ptr consists of two pointers — one pointing to data, the other to the reference counter (this is why I’m now passing List by const reference rather than by value — although it’s not clear if this makes much difference).
Notice that I was careful to always do Item allocations using make_shared, rather than allocating data using new and then turning it into a shared_ptr. This way the counter is allocated in the same memory block as the Item. This not only avoids the overhead of a separate call to new for the (shared) counter, but also helps locality of reference.
Then there is the issue of accessing the counter. Notice that the counter is only accessed when an Item is constructed or destroyed, and not, for instance, when the list is traversed. So that’s good. What’s not good is that, in a multithreaded environment, counter access requires synchronization. Granted, this is usually the lock-free kind of synchronization provided by shared_ptr, but it’s still there.
So my original claim that persistent data structures didn’t require synchronization was not exactly correct in a non-garbage-collected environment. The problem is somewhat mitigated by the fact that this synchronization happens only during construction and destruction, which are already heavy duty allocator operations with their own synchronization needs.
The cost of synchronization varies depending on how much contention there is. If there are only a few threads modifying a shared list, collisions are rare and the cost of a counter update is just one CAS (Compare And Swap) or an equivalent atomic operation. The overhead is different on different processor, but the important observation is that it’s the same overhead as in an efficient implementation of a mutex in the absence of contention (the so called thin locks or futexes require just one CAS to enter the critical section — see my blog about thin locks).
At high contention, when there are a lot of collisions, the reference count synchronization degenerates to a spin lock. (A mutex, on the other hand, would fall back on the operating system, since it must enqueue blocked threads). This high contention regime, however, is unlikely in the normal usage of persistent data structures.
A little digression about memory management is in order. Allocating Items from a garbage-collected heap would likely be more efficient, because then persistent objects would really require zero synchronization, especially if we had separate per-processor heaps. It’s been known for some time that the tradeoff between automated garbage collection (GC) and reference counting (RC) is far from obvious. David Bacon et. al. showed that, rather than there being one most efficient approach, there is a whole spectrum of solutions between GC and RC, each with their own performance tradeoffs.
There is a popular belief that GC always leads to long unexpected pauses in the execution of the program. This used to be true in the old times, but now we have incremental concurrent garbage collectors that either never “stop the world” or stop it for short bounded periods of time (just do the internet search for “parallel incremental garbage collection”). On the other hand, manual memory management a la C++ has latency problems of its own. Data structures that use bulk allocation, like vectors, have to occasionally double their size and copy all elements. In a multithreaded environment, this not only blocks the current thread from making progress but, if the vector is shared, may block other threads as well.
The use of shared_ptr in the implementation of containers may also result in arbitrarily long and quite unpredictable slowdowns. A destruction of a single shared_ptr might occasionally lead to a cascade of dereferences that deallocate large portions of a data structure, which may in turn trigger a bout of free list compactions within the heap (this is more evident in tree-like, branching, data structures). It’s important to keep these facts in mind when talking about performance tradeoffs, and use actual timings in choosing implementations.
List Functions
Since, as I said, a persistent list is immutable, we obviously cannot perform destructive operations on it. If we want to increment each element of a list of integers, for instance, we have to create a new list (which, by the way, doesn’t change the asymptotic behavior of such an operation). In functional languages such bulk operations are normally implemented using recursion.
You don’t see much recursion in C++ because of one problem: C++ doesn’t implement tail recursion optimization. In any functional language worth its salt, a recursive function that calls itself in its final step is automatically replaced by a loop. In C++, recursion consumes stack and may lead to stack overflow. So it’s the lack of guaranteed tail recursion optimization that is at the root of C++ programmers’ aversion to recursion. Of course, there are also algorithms that cannot be made tail recursive, like tree traversals, which are nevertheless implemented using recursion even in C++. One can make an argument that (balanced) tree algorithms will only use O(log(N)) amounts of stack, thus mitigating the danger of stack overflow.
List algorithms may be implemented either using recursion or loops and iterators. I’ll leave the implementation of iterators for a persistent list to the reader — notice that only a const forward iterator or an output iterator make sense in this case. Instead I’ll show you a few examples of recursive algorithms. They can all be rewritten using loops and iterators, but it’s interesting to see them in the purest form.
The example of incrementing each element of a list is a special case of a more general algorithm of applying a function to all elements of a list. This algorithm is usually called fmap and can be generalized to a large variety of data structures. Those parameterized data structures that support fmap are called functors (not to be confused with the common C++ misnomer for a function object). Here’s fmap for our persistent list:
template<class U, class T, class F>
List<U> fmap(F f, List<T> lst)
{
static_assert(std::is_convertible<F, std::function<U(T)>>::value,
"fmap requires a function type U(T)");
if (lst.isEmpty())
return List<U>();
else
return List<U>(f(lst.front()), fmap<U>(f, lst.pop_front()));
}
An astute reader will notice a similarity between fmap and the standard C++ algorithm transform in both semantics and interface. The power of the Standard Template Library can be traced back to its roots in functional programming.
The static_assert verifies that the the template argument F is convertible to a function type that takes T and returns U. This way fmap may be instantiated for a function pointer, function object (a class with an overloaded operator()), or a lambda, as long as its output type is convertible to U. Ultimately, these kind of constraints should be expressible as concepts.
The compiler is usually able to infer type arguments for a template function by analyzing the instantiation context. Unfortunately, inferring the return type of a functional argument like F in fmap is beyond its abilities, so you are forced to specify the type of U at the call site, as in this example (also, toupper is defined to return an int rather than char):
auto charLst2 = fmap<char>(toupper, charLst);
There is a common structure to recursive functions operating on functional data structures. They usually branch on, essentially, different constructors. In the implementation of fmap, we first check for an empty list — the result of the empty constructor — otherwise we deconstruct the (head, tail) constructor. We apply the function f to the head and then recurse into the tail.
Notice that fmap produces a new list of the same shape (number and arrangement of elements) as the original list. There are also algorithms that either change the shape of the list, or produce some kind of a “total” from a list. An example of the former is filter:
template<class T, class P>
List<T> filter(P p, List<T> lst)
{
static_assert(std::is_convertible<P, std::function<bool(T)>>::value,
"filter requires a function type bool(T)");
if (lst.isEmpty())
return List<T>();
if (p(lst.front()))
return List<T>(lst.front(), filter(p, lst.pop_front()));
else
return filter(p, lst.pop_front());
}
Totaling a list requires some kind of running accumulator and a function to process an element of a list and “accumulate” it in the accumulator, whatever that means. We also need to define an “empty” accumulator to start with. For instance, if we want to sum up the elements of a list of integers, we’d use an integer as an accumulator, set it initially to zero, and define a function that adds an element of a list to the accumulator.
In general such accumulation may produce different results when applied left to right or right to left (although not in the case of summation). Therefore we need two such algorithms, foldl (fold left) and foldr (fold right).
The right fold first recurses into the tail of the list to produce a partial accumulator then applies the function f to the head of the list and that accumulator:
template<class T, class U, class F>
U foldr(F f, U acc, List<T> lst)
{
static_assert(std::is_convertible<F, std::function<U(T, U)>>::value,
"foldr requires a function type U(T, U)");
if (lst.isEmpty())
return acc;
else
return f(lst.front(), foldr(f, acc, lst.pop_front()));
}
Conversely, the left fold first applies f to the head of the list and the accumulator that was passed in, and then calls itself recursively with the new accumulator and the tail of the list. Notice that, unlike foldr, foldl is tail recursive.
template<class T, class U, class F>
U foldl(F f, U acc, List<T> lst)
{
static_assert(std::is_convertible<F, std::function<U(U, T)>>::value,
"foldl requires a function type U(U, T)");
if (lst.isEmpty())
return acc;
else
return foldl(f, f(acc, lst.front()), lst.pop_front());
}
Again, the STL implements a folding algorithm as well, called accumulate. I’ll leave it to the reader to figure out which fold it implements, left or right, and why.
In C++ we can have procedures that instead of (or along with) producing a return value produce side effects. We can capture this pattern with forEach:
template<class T, class F>
void forEach(List<T> lst, F f)
{
static_assert(std::is_convertible<F, std::function<void(T)>>::value,
"forEach requires a function type void(T)");
if (!lst.isEmpty()) {
f(lst.front());
forEach(lst.pop_front(), f);
}
}
We can, for instance, use forEach to implement print:
template<class T>
void print(List<T> lst)
{
forEach(lst, [](T v)
{
std::cout << "(" << v << ") ";
});
std::cout << std::endl;
}
Singly-linked list concatenation is not a cheap operation. It takes O(N) time (there are however persistent data structures that can do this in O(1) time). Here’s the recursive implementation of it:
template
List concat(List const & a, List const & b)
{
if (a.isEmpty())
return b;
return List(a.front(), concat(a.pop_front(), b));
}
We can reverse a list using foldl in O(N) time. The trick is to use a new list as the accumulator:
template<class T>
List<T> reverse(List<T> const & lst)
{
return foldl([](List<T> const & acc, T v)
{
return List<T>(v, acc);
}, List<T>(), lst);
}
Again, all these algorithms can be easily implemented using iteration rather than recursion. In fact, once you define (input/output) iterators for a List, you can just use the STL algorithms.
Conclusion
A singly linked list is not the most efficient data structure in the world but it can easily be made persistent. What’s important is that a persistent list supports all the operation of a FIFO stack in constant time and is automatically thread safe. You can safely and efficiently pass such lists to and from threads without the need to synchronize (except for the internal synchronization built into shared pointers).
Complete code for this post is available on GitHub. It uses some advanced features of C++11. I compiled it with Visual Studio 2013.
Appendix: Haskell Implementation
Functional languages support persistent lists natively. But it’s not hard to implement lists explicitly. The following one liner is one such implementation in Haskell:
data List t = Empty | Cons t (List t)
This list is parameterized by the type parameter t (just like our C++ template was parameterized by T). It has two constructors, one called Empty and the other called Cons. The latter takes two arguments: a value of type t and a List of t — the tail. These constructors can be used for both the creation of new lists and for pattern-matching. For instance, here’s the implementation of cat (the function concat is already defined in the Haskell default library so I had to use a different name):
cat Empty lst = lst
cat (Cons x tail) lst = Cons x (cat tail lst)
The selection between the empty and non-empty case is made through pattern matching on the first argument. The first line matches the pattern (constructor) Empty. The second line matches the Cons pattern and, at the same time, extracts the head and the tail of the list (extraction using pattern matching is thus much safer than calling head or tail because an empty list won’t match this pattern). It then constructs a new list with x as the head and the (recursive) concatenation of the first list’s tail with the second list. (I should mention that this recursive call is lazily evaluated in Haskell, so the cost of cat is amortized across many accesses to the list — more about lazy evaluation in the future.)